Versión actualizada de la guía preparada por D. Ávido en 2013.Durante los distintos trabajos que realizamos, como el modelado de hallazgos, superficies de excavación y también soportes de arte rupestre, fuimos recopilando una serie de advertencias y consejos con el objetivo de hacer una guía para que quien utilizara el software por primera vez pueda hacerlo con menos inconvenientes.En esta guía mostramos cómo utilizar Python Photogrammetry Toolbox (PPT) a través de su interfaz de usuario (GUI en inglés) para obtener nubes de puntos tridimensionales a partir de un corpus fotográfico. Vale aclarar que esta guía supone que el software fue instalado previamente y que el sistema operativo utilizado es Windows. En caso de necesitar instrucciones para descarga e instalación, visitar esta página.
Cómo usar el programa PPT para realizar nubes de puntos 3D
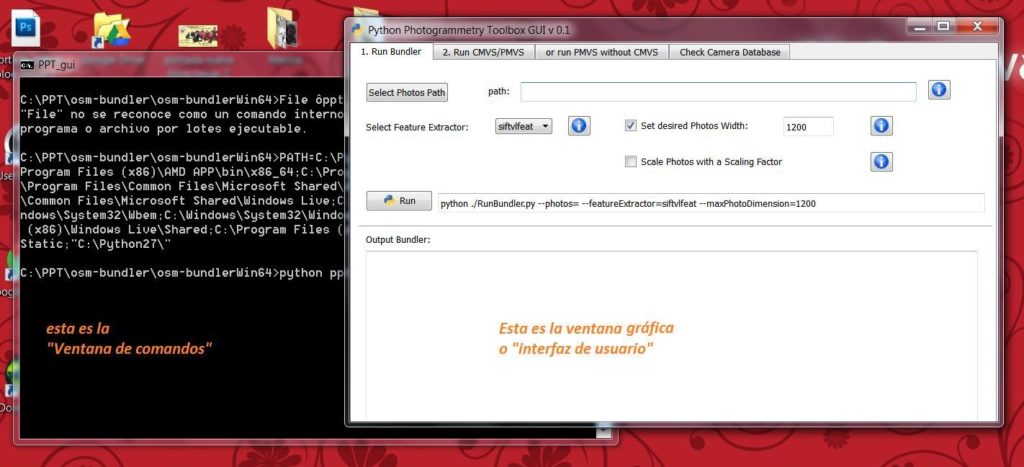
La interfaz de usuario (es decir, la ventana a través de la cual interactuamos con los algoritmos que harán el trabajo por nosotros) tiene 4 solapas. La primera se llama “1. Run Bundler”, la segunda “2. Run CMVS/PMVS”, la tercera es “or run PMVS without CMVS” y la última es “Check Camera Database”.
1) Lo primero que hay que hacer es tener preparada la carpeta con las fotos que se desea procesar. ¿Qué significa tenerla preparada? ¿Cómo preparla? Tené en cuenta esto:
- que la carpeta sólo contenga las fotos que seleccionaste;
- que el nombre de la carpeta no tenga espacios, tildes ni letras raras;
- que el lugar donde esté guardada la carpeta tena una ruta simple (por ejemplo, directamente en el disco C, o en la carpeta “Imágenes”).
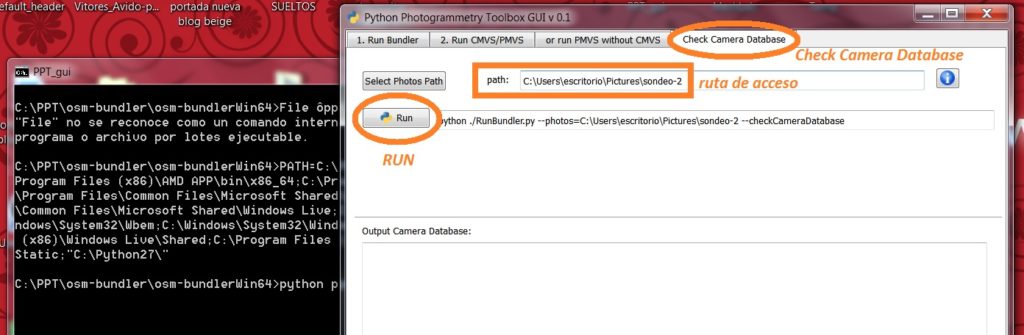
2) Copiar la ruta de acceso; en palabras simples, la ruta de acceso es el lugar “la dirección” donde está guardada la carpeta con las fotos, por ejemplo “C:\Users\escritorio\Pictures\sondeo-2”

3) En la interfaz gráfica de usuario, buscá la solapa “Check Camera Database”. Pegar la ruta de acceso a la carpeta con las fotos en el campo “PATH” y luego dar click al botón “RUN”. En la ventana de comandos que está al fondo saldrá un mensaje que dirá que la cámara ya está registrada en su base de datos, por lo que se puede proceder al punto 4; o bien un mensaje solicitando el tamaño (ancho) del sensor CCD de la cámara en mm. Esta información debe ser precisa ya que se utiliza para calcular las deformaciones en cada foto y luego las posiciones de la cámara; si no conocés el tamaño del sensor, se puede buscar el dato en los siguientes sitios web: http://www.digicamdb.com/ o en http://www.dpreview.com (NOTA: el ancho del sensor es el tamaño más grande indicado, por ejemplo la cámara “PowerShot SX500 IS” tiene un sensor de tamaño 1/2.3″, cuyas dimensiones en milímetros son 6.16 x 4.62mm. El ancho del sensor que se debe indicar en la ventana de comandos es 6.16). Una vez indicado ese dato, se puede seguir.
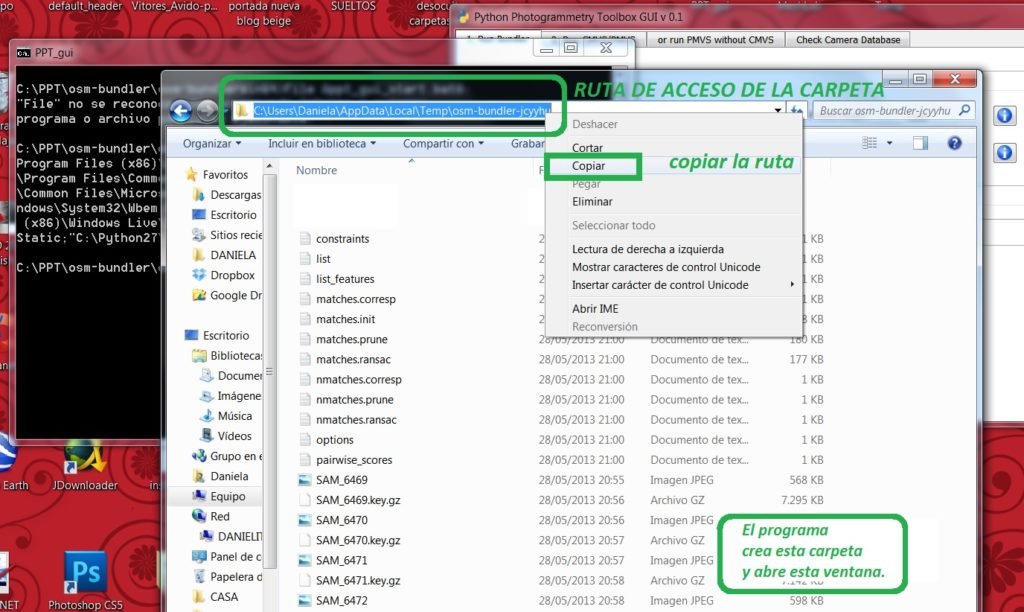
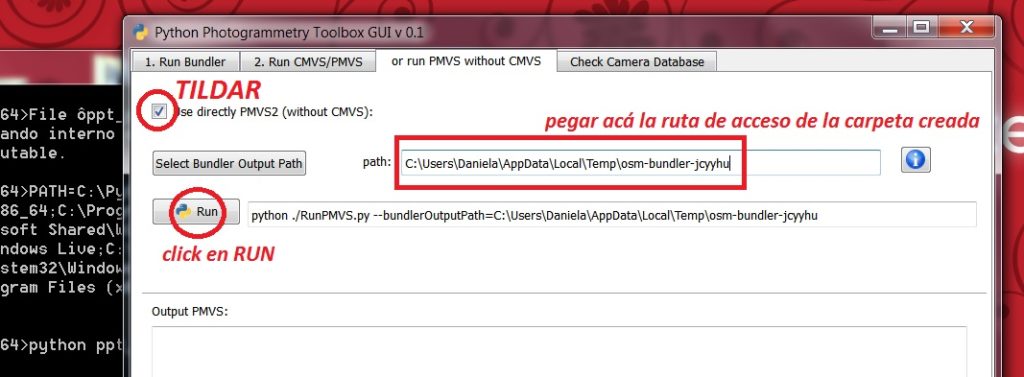
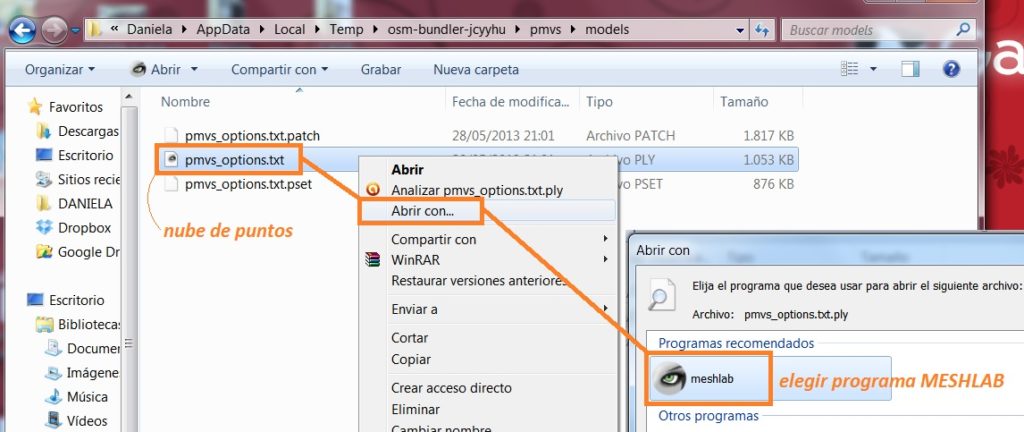
6) Al finalizar el proceso, dentro de la carpeta “osm-bundler-iwy455” creada por el programa se habrán creado 2 subcarpetas: “bundler” y “pmvs”. Dentro de la carpeta PMVS, habrá 3 subcarpetas: “model”, “txt”, y “visualize”. Finalmente, dentro de la subcarpeta “models” se encuentra un archivo llamado genéricamente “pmvs_options.txt”, con extensión .ply, el cual contiene la nube de puntos en 3D, siempre y cuando el paso utilizado en el punto 5 haya sido “PMVS without CMVS”.
7) Para visualizar los resultados, se debe contar con un software adicional; en nuestro caso empleamos Meshlab, que además de visualizar permite editar la nube de puntos, crear una malla a partir de esta, y modificarla. Conviene tener ya instalado Meshlab (se descarga desde acá) e indicar a Windows que el archivo que queremos ver se abre con él. Entonces, podés hacer doble clik en el archivo “pmvs_options.txt” indicado en el punto anterior y listo: ya podés ver la nube de puntos en 3D.
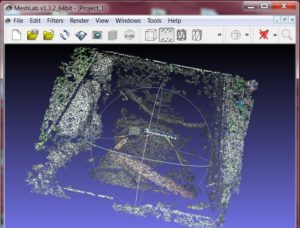
Ejemplo de una nube de puntos densa en vista en Meshlab (la hicimos con 3 o 4 fotos)

Otro ejemplo (hasta se puede ver el cucharín):
Hasta allí, se ha creado la nube de puntos con la cual modelar un objeto en 3d. Ahora bien, para hacer ese último paso, que por suerte se resuelve en Meshlab, habrá que redactar otra guía (o leer la que prepararon los genios de ATOR en su blog).
Lecturas recomendadas:
CIGNONI, P., M. CALLIERI, M. CORSINI, M. DELLEPIANE, F. GANOVELLI, G. RANZUGLIA. 2008. MeshLab: an Open-Source Mesh Processing Tool. Sixth Eurographics Italian Chapter Conference, pp: 129-136. Descargar
MOULON, P. y A. BEZZI. 2011. Python Photogrammetry Toolbox: a free solution for three-dimensional documentation. En: ArcheoFoss. 6º Workshop Open Source, Free Software e Open Format nei processi di ricerca archeologica, Nápoles. Descargar
La versión original (2013) de esta guía en formato PDF puede descargarse haciendo click aquí.
* Originalmente publicado el 12 de mayo de 2017 en el Blog del Equipo del Limay:
http://arqueologialimay.blogspot.com.ar/2017/05/arqueofaunas-digitales-una-guia-para.html
** Actualizado el 8 de abril de 2019.