Continuando la prueba de software, ejemplificamos el uso de VisualSfM (VSFM) de Changchang Wu.
La aplicación integra desde la identificación de rasgos de las imágenes hasta la reconstrucción de la nube de puntos densa. Uno de sus puntos positivos es la interfaz que provee opciones navegables por menú, e incluso permite una visualización interactiva mientras se procesa la reconstrucción. Otro punto favorable es que posteriormente a la creación de una nube de puntos pueden agregarse más imágenes y procesarlas en adición a las existentes.
Hay versiones para 32 o 64 bits en distintos sistemas operativos. VSFM recurre a muchos de los mismos algoritmos y paquetes de software que otros programas, y que en algunos casos deben agregarse manualmente a la instalación.
El ensayo lo realizamos en windows. Como la página web indica, descargamos cmvs/pmvs, SiftGPU (aunque el enlace parece estar caído, habría una alternativa en este enlace).
Luego, en la misma carpeta del ejecutable VisualSFM.exe se deben copiar los archivos cmvs/pmvs/genOption/pthreadVc2.dll, cmvs.exe/pmvs2.exe/genOption.exe
Ejecución
Para el ensayo usamos el mismo set de fotos que usamos al ejemplificar el uso de Regard3D.
Teniendo el set de imágenes en una carpeta de trabajo, las agregamos desde el menú “File → Open Multi Images” o el botón ![]() de la barra de herramientas.
de la barra de herramientas.

Iniciamos el reconocimiento y concordancia de rasgos desde el menú “SfM → Pairwise Matching → Compute Missing Match” o el botón ![]() de la barra de tareas. Si las fotografías están tomadas en una secuencia espacial larga o e extrajeron como cuadros de un video, se suele recomendar la opción “SfM → Pairwise Matching → Compute Sequence Match” porque ahorra tiempo al buscar las coincidencias sólo entre las imágenes precedentes y consecuentes de cada toma, en lugar de probar la totalidad e combinaciones posibles.
de la barra de tareas. Si las fotografías están tomadas en una secuencia espacial larga o e extrajeron como cuadros de un video, se suele recomendar la opción “SfM → Pairwise Matching → Compute Sequence Match” porque ahorra tiempo al buscar las coincidencias sólo entre las imágenes precedentes y consecuentes de cada toma, en lugar de probar la totalidad e combinaciones posibles.
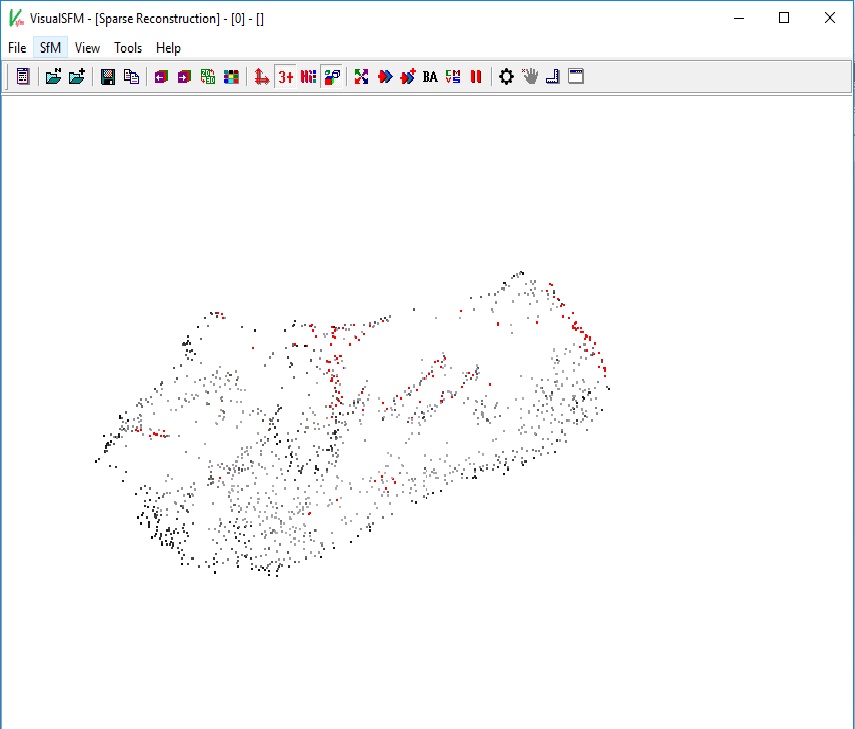
Ejecutamos la reconstrucción dispersa con “SfM → Reconstruct Sparse” o el botón ![]() .
.
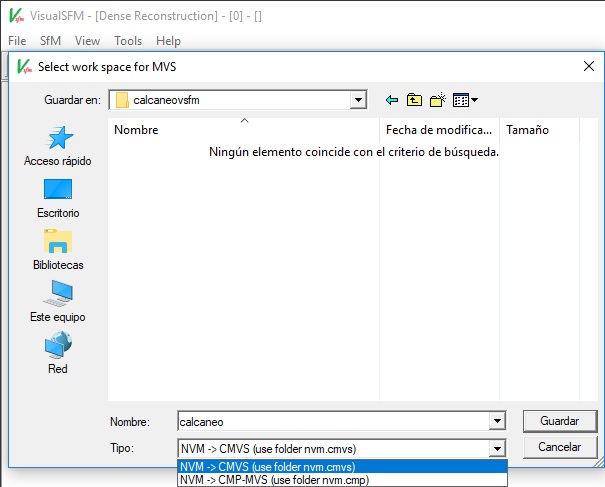
A continuación, la nube densa de puntos se genera con “Sfm → Reconstruct Dense” o el botón ![]() , lo que invoca el paquete cmvs/pmvs que se agregó manualmente en la instalación.
, lo que invoca el paquete cmvs/pmvs que se agregó manualmente en la instalación.
El programa pide guardar un archivo .nvm y elegiremos crear una carpeta “.nvm.cmvs”.
Al terminar, creará un archivo .ply con el mismo nombre, que podremos visualizar directamente en VSFM apretando la tecla Tab, o abrir en Meshlab para su posterior edición.

Es notoria la velocidad con que se procesan la detección de rasgos y la nube de puntos dispersa, que pueden tardar apenas unos segundos para una decena de imágenes (pero recordemos que la detección de coincidencia de rasgos se incrementa exponencialmente con la cantidad de fotos, y si cargamos más de un centenar podría tomar días). El procesamiento de la nube densa toma relativamente más tiempo.
* Recomendamos la página de Peter Falkingham para comparaciones de programas, instalaciones y procesamientos, especialmente en estos dos enlaces:
- Trying all the free Photogrammetry! https://peterfalkingham.com/2016/09/14/trying-all-the-free-photogrammetry/ ( Publicado el 14 de septiembre de 2016)
- Free photogrammetry software review: 2017. https://peterfalkingham.com/2017/12/17/free-photogrammetry-software-review-2017/ (Publicado el 17 de diciembre de 2017)